
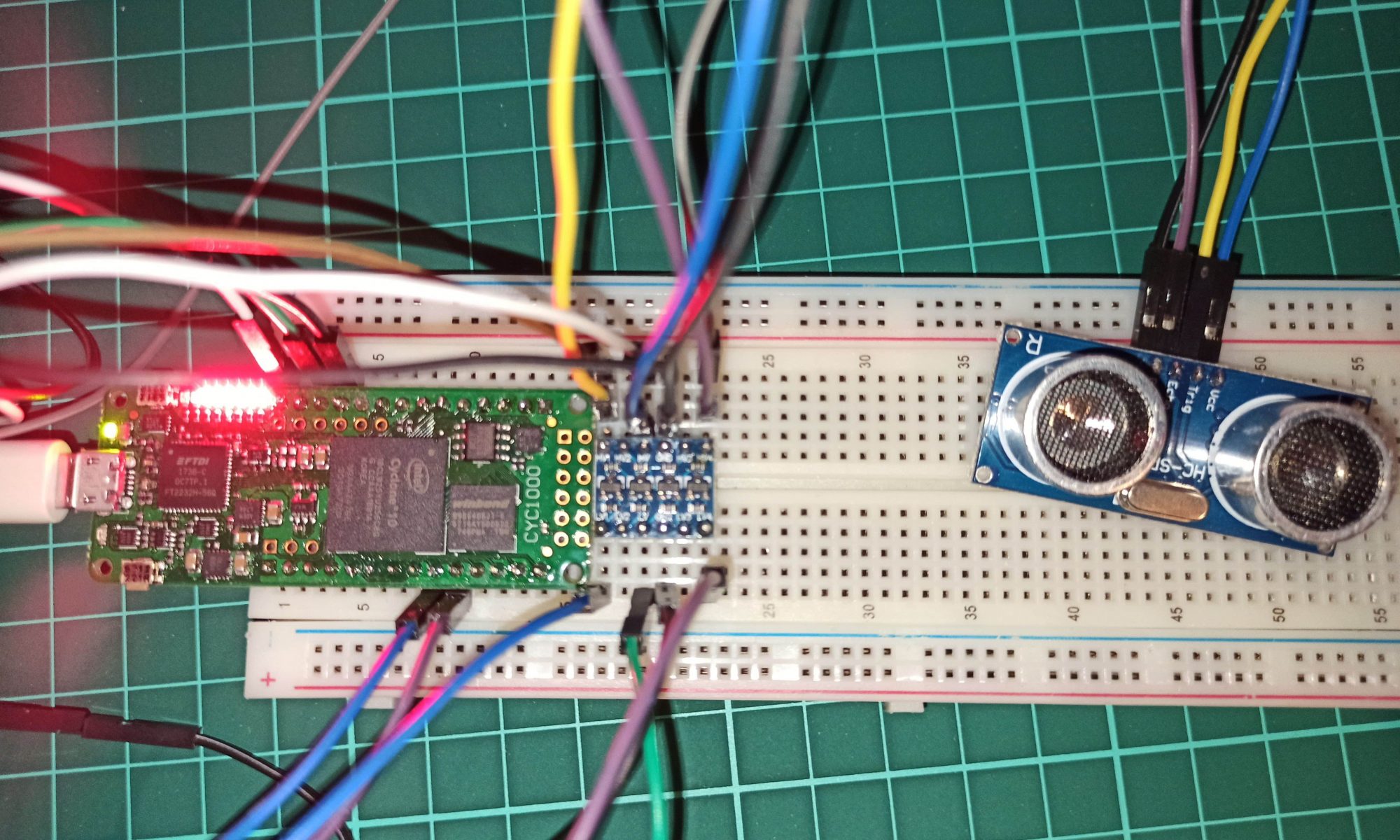
Distance measurement with “HC-SR04” ultrasonic sensor and FPGA.
I used an “Arow CYC1000” FPGA board which includes an “10CL025YU256C8G” IC from “Intel Cyclone 10 LP” FPGA family. I connected the “ECHO” and “TRIG” pins of the sensor to the FPGA through a bi-directional logic voltage converter circuit. CYC1000 board has a 12MHz oscillator inside and I designed the digital system so as to work with a 12Mhz clock.
HC-SR04 is a distance measurement sensor, which radiates sound and listens for the reflected sound. Since the speed of sound in air is near to 1/29 centimeters per microsecond, [travel time of the sound in microseconds] / 58 gives the distance between the sensor and the obstacle. We must divide the travel time by 58 instead of 29 because the sound travels the distance one more time after the reflection.
A 10 microseconds trigger signal is required to start the measurement then the HC-SR04 responses with an echo signal. The duration of the echo signal equals to the travel duration of the sound, which travels between sensor and the obstacle twice. Our digital system counts microseconds while the echo signal is on ‘high’ level and compares the counted value with the multiples of 58. An LED turns on or off on FPGA board for every 5 centimeters of distance.

You can download the VHDL code from here.